

This project studies how to guide a deputy spacecraft into rendezvous with a target while minimizing control effort. The work is built around relative motion in the Hill frame, where the target spacecraft defines the local orbital reference frame and the deputy is guided through proximity operations using the linearized Clohessy-Wiltshire equations.
Built as a graduate optimal-control project, the core idea is broader than the class setting: derive a continuous-time minimum-energy guidance law, implement it in MATLAB, and validate it across multiple rendezvous geometries that include direct docking, offset terminal states, and a compact nominal docking case.
[Coming soon]
Project Motivation
Rendezvous and proximity operations are central to docking, inspection, servicing, and formation-flying missions. The hard part is not only reaching the target, but reaching it with the right terminal position and velocity while using limited propellant. This project frames that challenge as a minimum-energy optimal-control problem in the Hill frame.
The resulting guidance law gives a direct way to compute the acceleration command needed to satisfy a prescribed terminal state. Instead of tuning a feedback controller first, the project starts from the continuous-time optimal-control formulation and then uses simulation to check whether the derived law behaves correctly across different relative-motion cases.
Relative-Motion Model
The deputy spacecraft is modeled relative to a chief spacecraft on a circular orbit. The Hill-frame state contains relative position and velocity, and the Clohessy-Wiltshire equations provide the linear time-invariant dynamics used by the guidance law.
Minimum-Energy Guidance
The controller minimizes integrated acceleration effort while enforcing the desired terminal state. Each scenario uses the same guidance structure, which makes the cases useful for comparing geometry, time horizon, and offset terminal requirements.
Mathematical Foundation
The math behind the project is compact enough to tell as a sequence. Start with a relative-motion state, write the Hill-frame dynamics, pose the minimum-energy problem, apply the optimality conditions, and then solve the two-point boundary value problem that enforces the desired final state.
Relative State and Mean Motion
The deputy is described in the chief spacecraft's local Hill frame. The state collects relative position and velocity, while the chief's mean motion sets the natural orbital frequency.
Here, ρ is relative position, v is relative velocity, u is commanded acceleration, μ is the gravitational parameter, and rc is the chief orbit radius.
Clohessy-Wiltshire Dynamics
For a circular chief orbit and small relative separation, the Hill-frame equations become a linear time-invariant model. This captures the coupling between radial and along-track motion while leaving cross-track motion as a harmonic mode.
These equations are the Clohessy-Wiltshire relative orbit equations with acceleration control in each Hill-frame axis.
State-Space Form
The scalar equations are assembled into the state-space form used by the simulations and guidance solve.
The first three rows map velocity into position; the lower rows encode the CW accelerations and direct acceleration control.
Minimum-Energy Objective
The rendezvous problem is posed as a fixed-time, fixed-endpoint optimal-control problem. The terminal state is specified by the scenario, and the cost penalizes total acceleration effort.
The reported runs use R = I, so the cost corresponds directly to integrated squared control acceleration.
Guidance Law from Optimality Conditions
Applying the Hamiltonian conditions produces a coupled state-costate system. Solving for the initial costate gives the control history that reaches the desired terminal state with minimum effort.
The final simulation summary tracks the conditioning of Φxλ; none of the reported cases required the pseudo-inverse fallback.
Simulation Results
The final simulation campaign includes four reference rendezvous scenarios plus a smaller nominal docking case. All cases use the Clohessy-Wiltshire truth model and converge to the requested terminal state.
| Case | Final Time | Final Position Error | Final Velocity Error | Peak Control Norm | Integrated Control Effort |
|---|---|---|---|---|---|
| Case 1 | 1000 s | 6.05e-18 m | 1.82e-15 m/s | 2.58e-2 m/s2 | 8.53e-2 |
| Case 2 | 1000 s | 2.27e-13 m | 9.59e-11 m/s | 4.51e-2 m/s2 | 2.55e-1 |
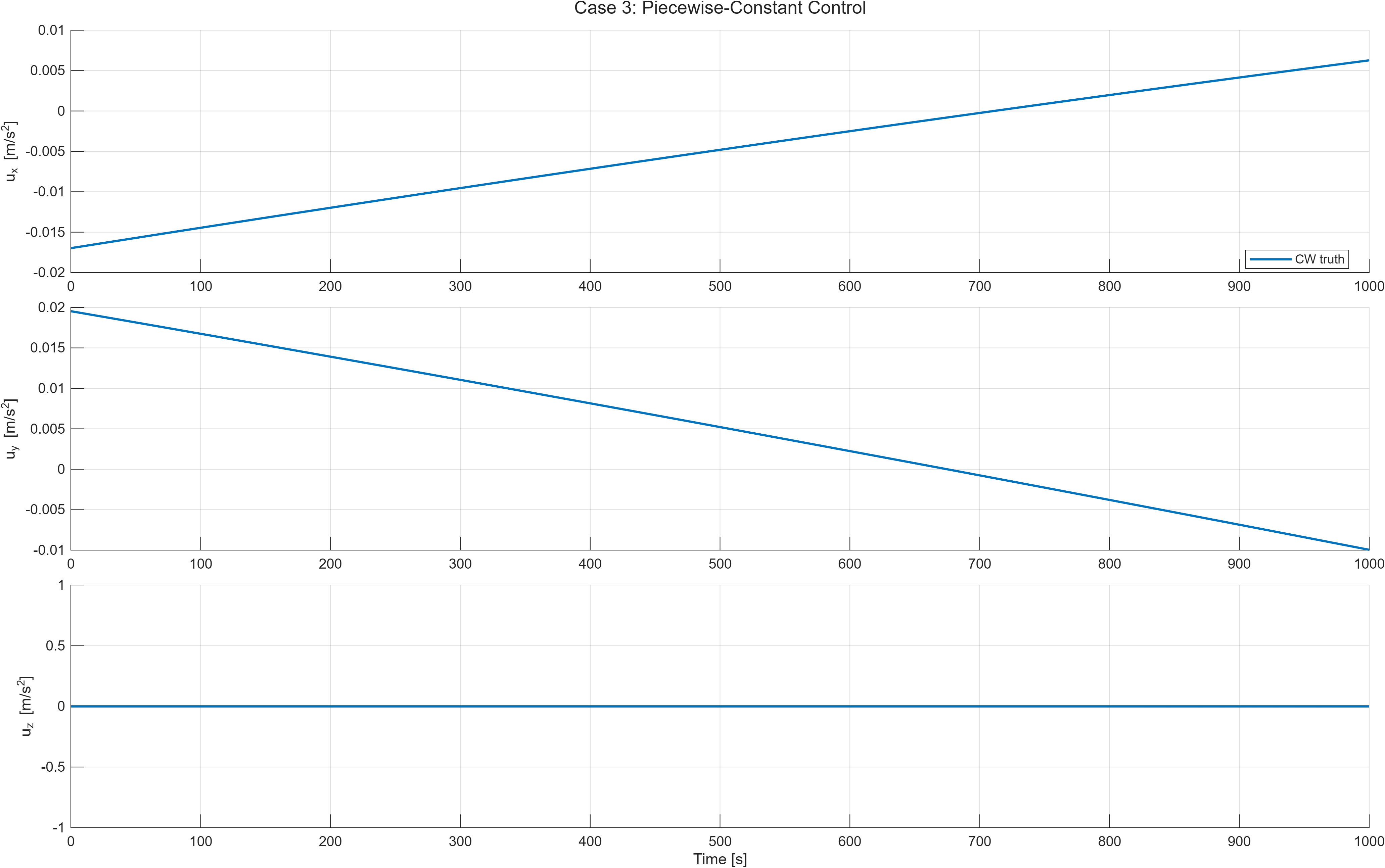
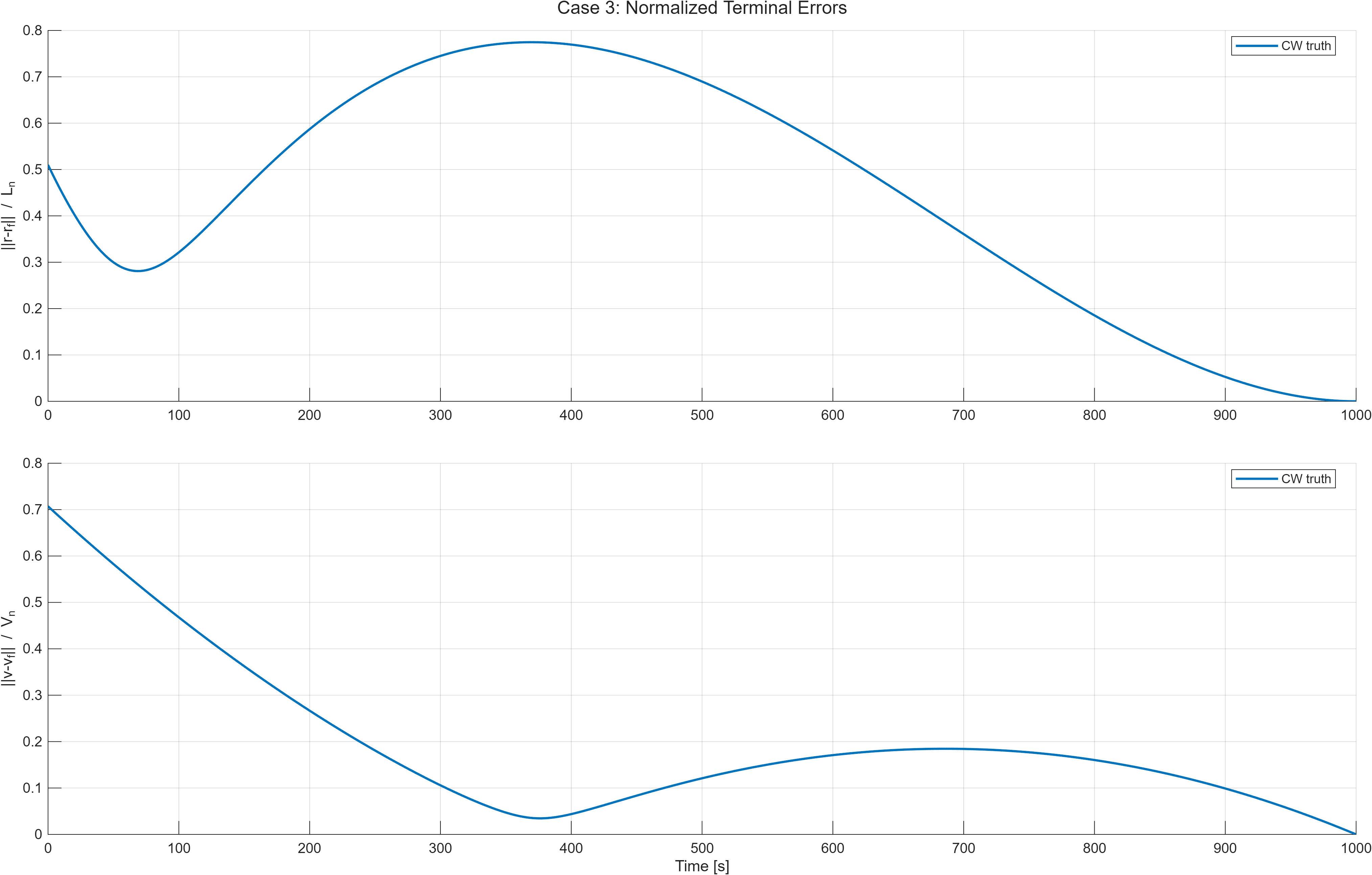
| Case 3 | 1000 s | 8.72e-18 m | 2.62e-15 m/s | 2.59e-2 m/s2 | 8.41e-2 |
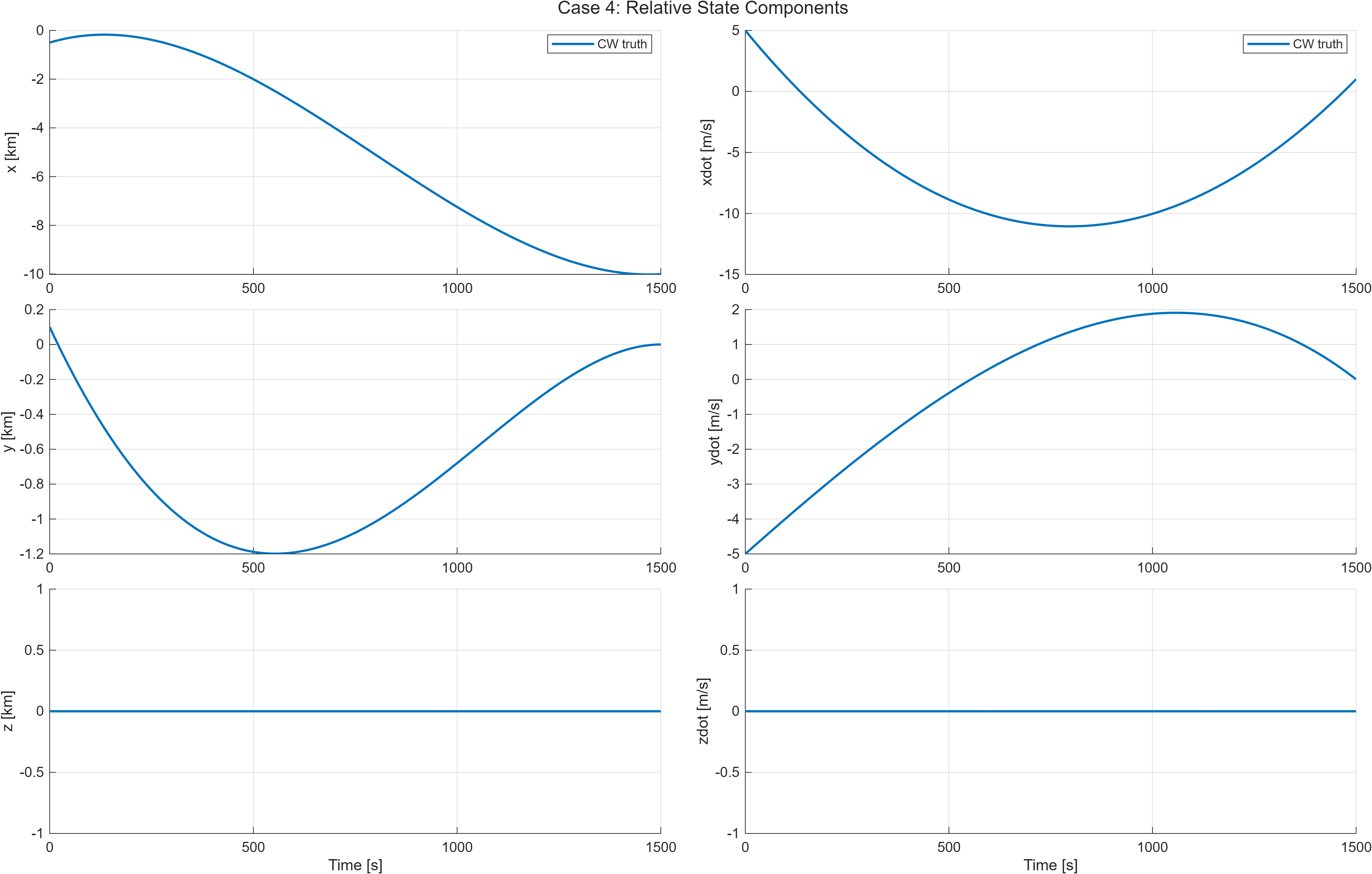
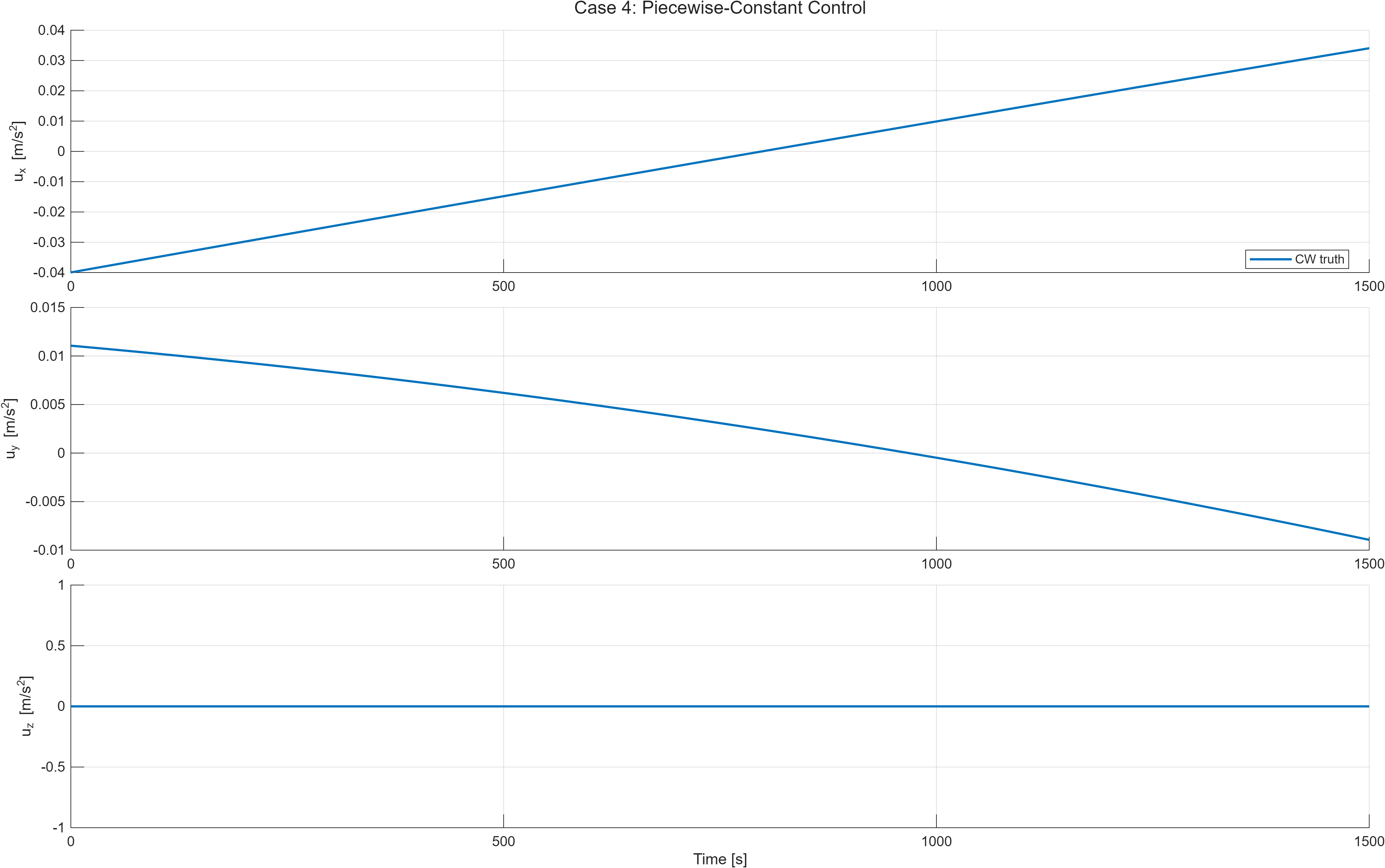
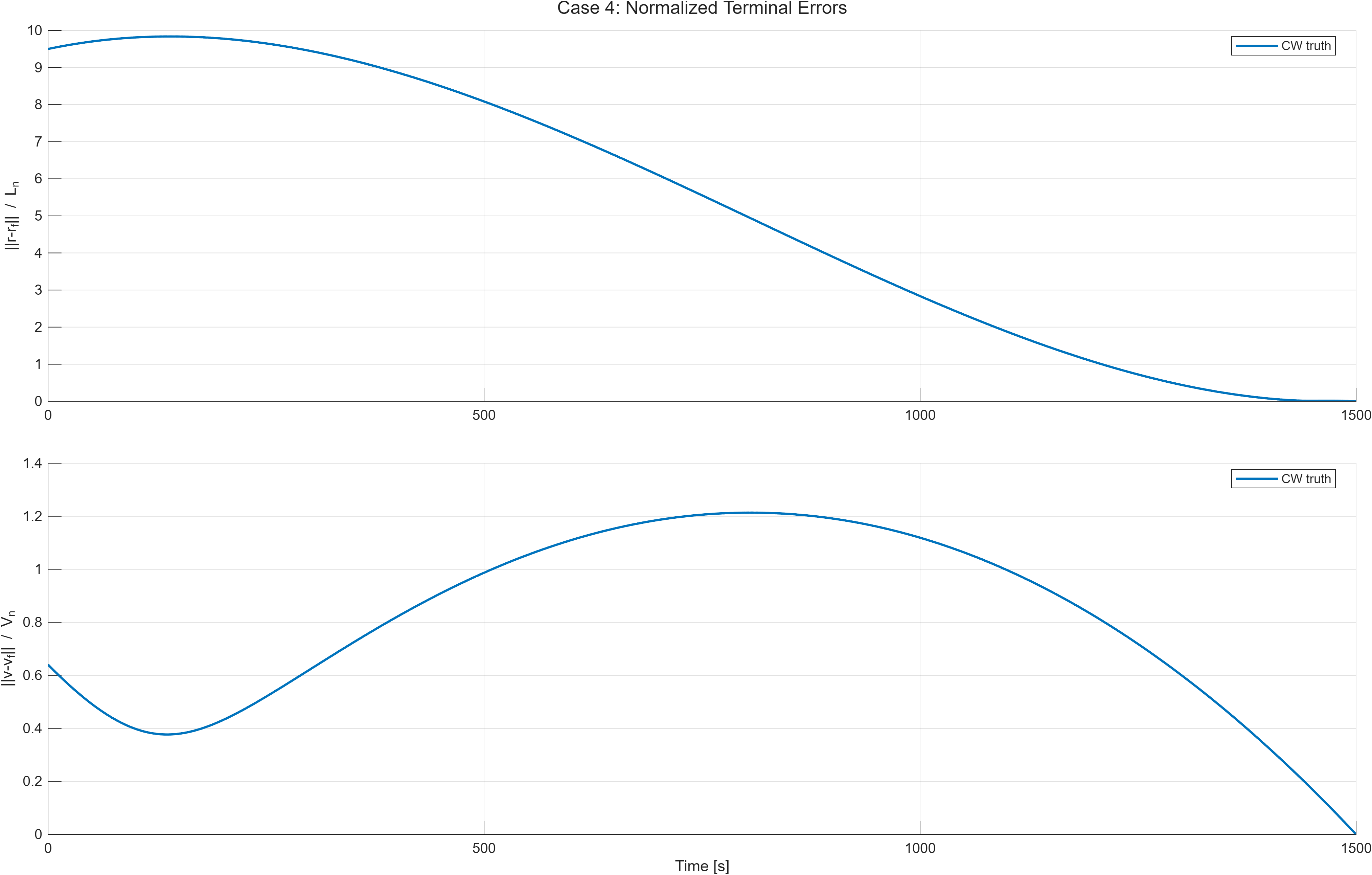
| Case 4 | 1500 s | 1.31e-17 m | 6.24e-10 m/s | 4.15e-2 m/s2 | 3.77e-1 |
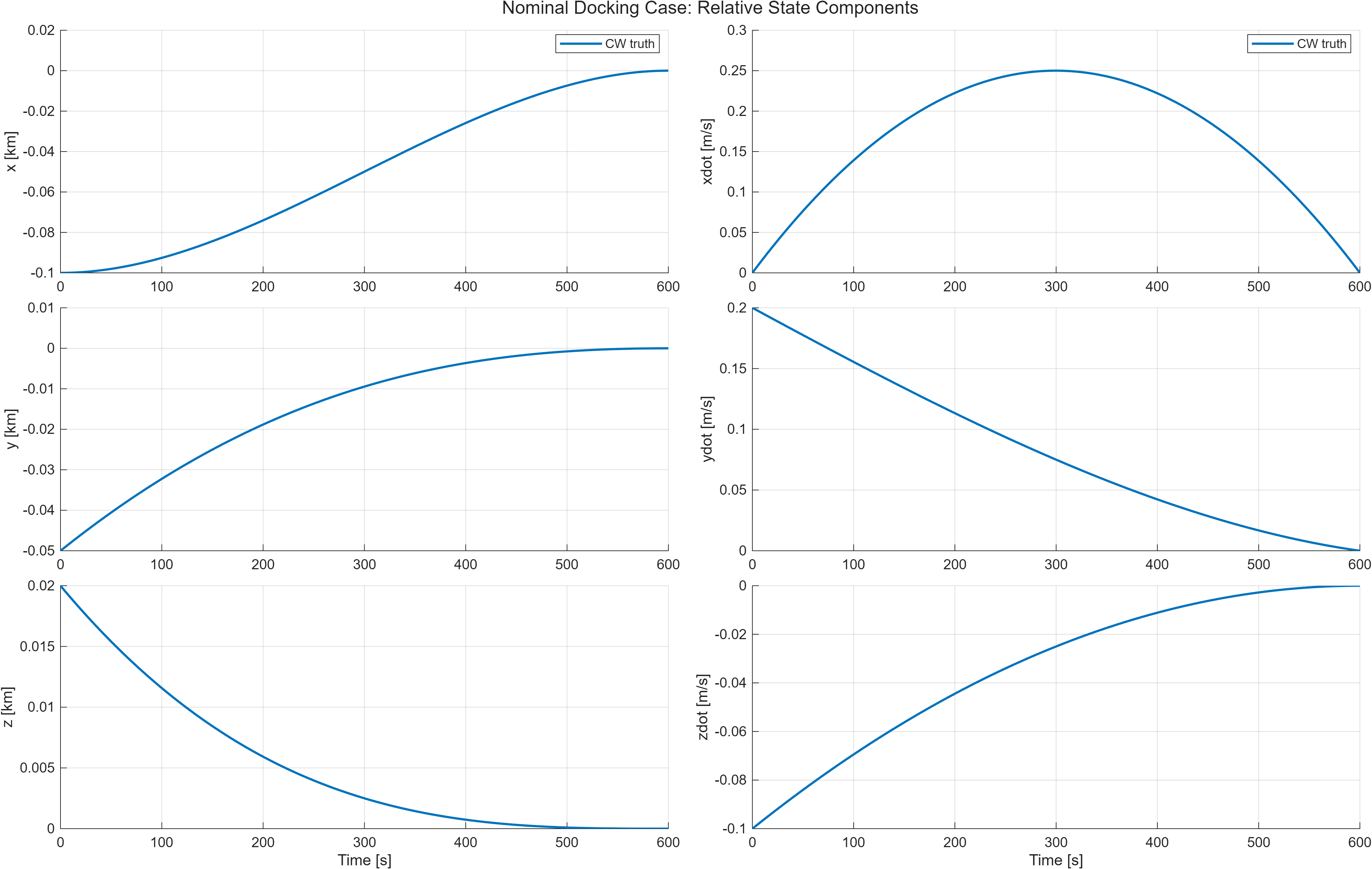
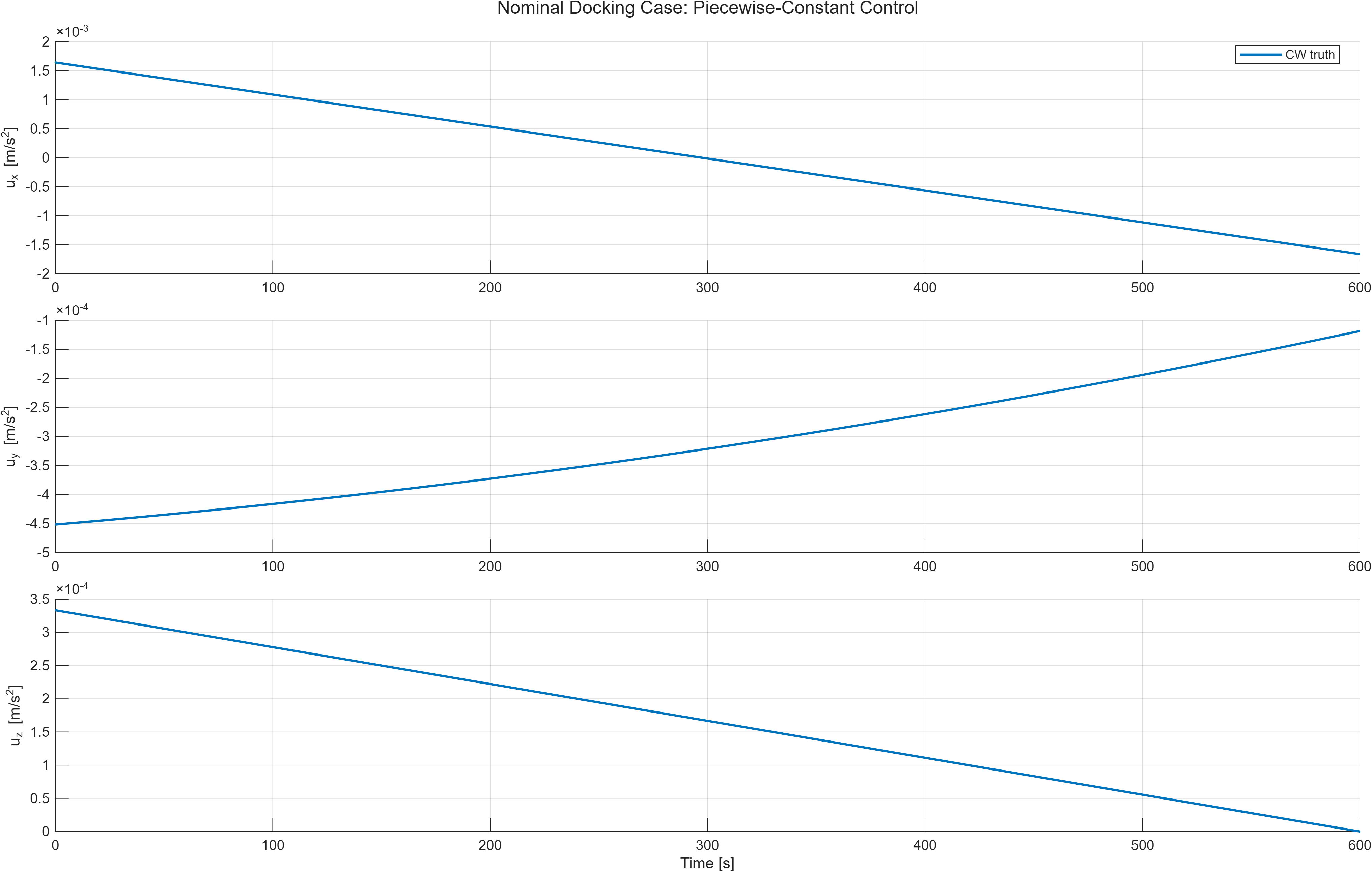
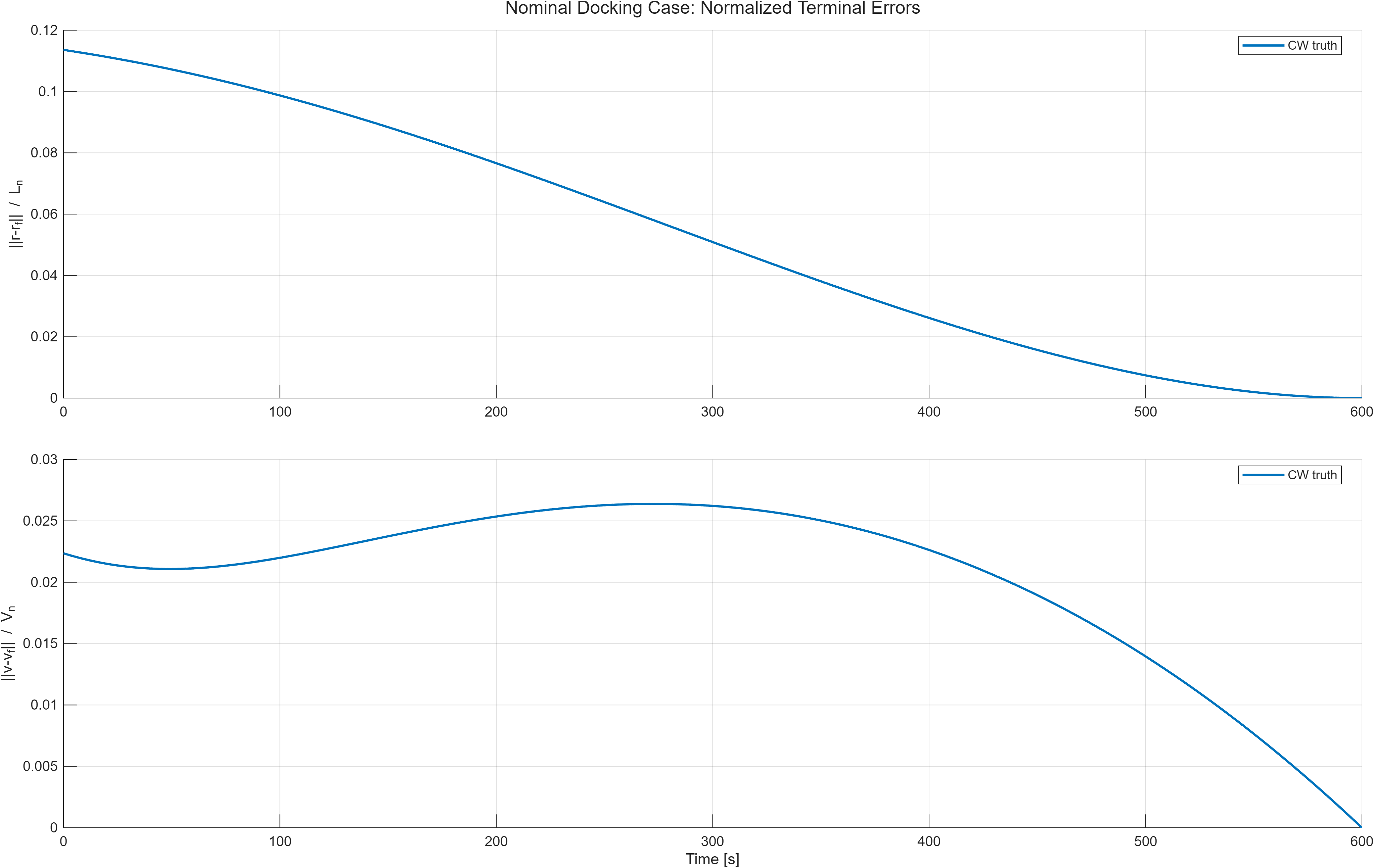
| Nominal Docking | 600 s | 1.33e-18 m | 4.00e-16 m/s | 1.74e-3 m/s2 | 3.16e-4 |
Case Studies
Each case below shows the Hill-frame trajectory and the corresponding animation. The state histories, control histories, and terminal error plots are included in expandable result panels so the full data stays available without turning the page into a wall of figures.
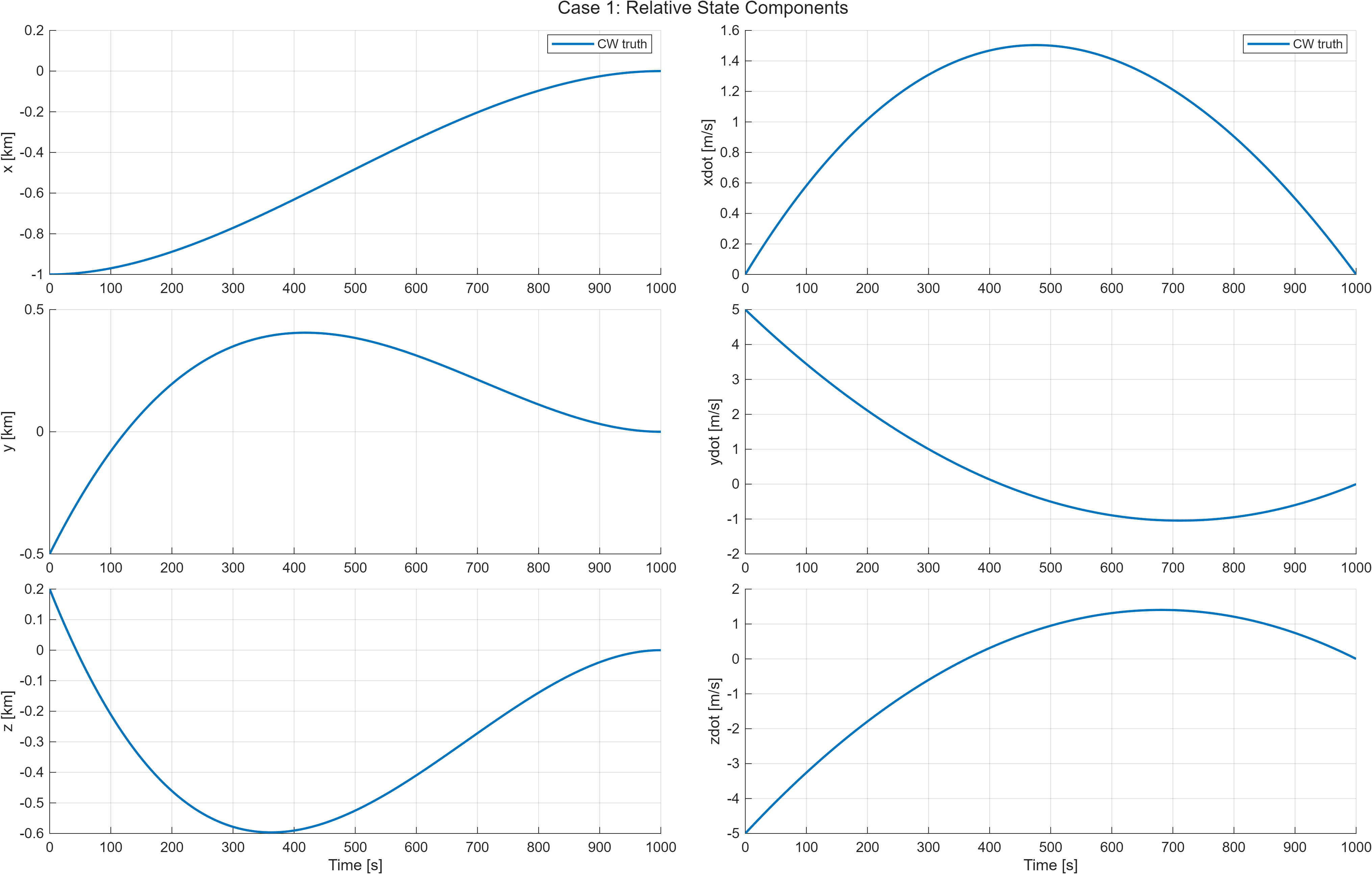
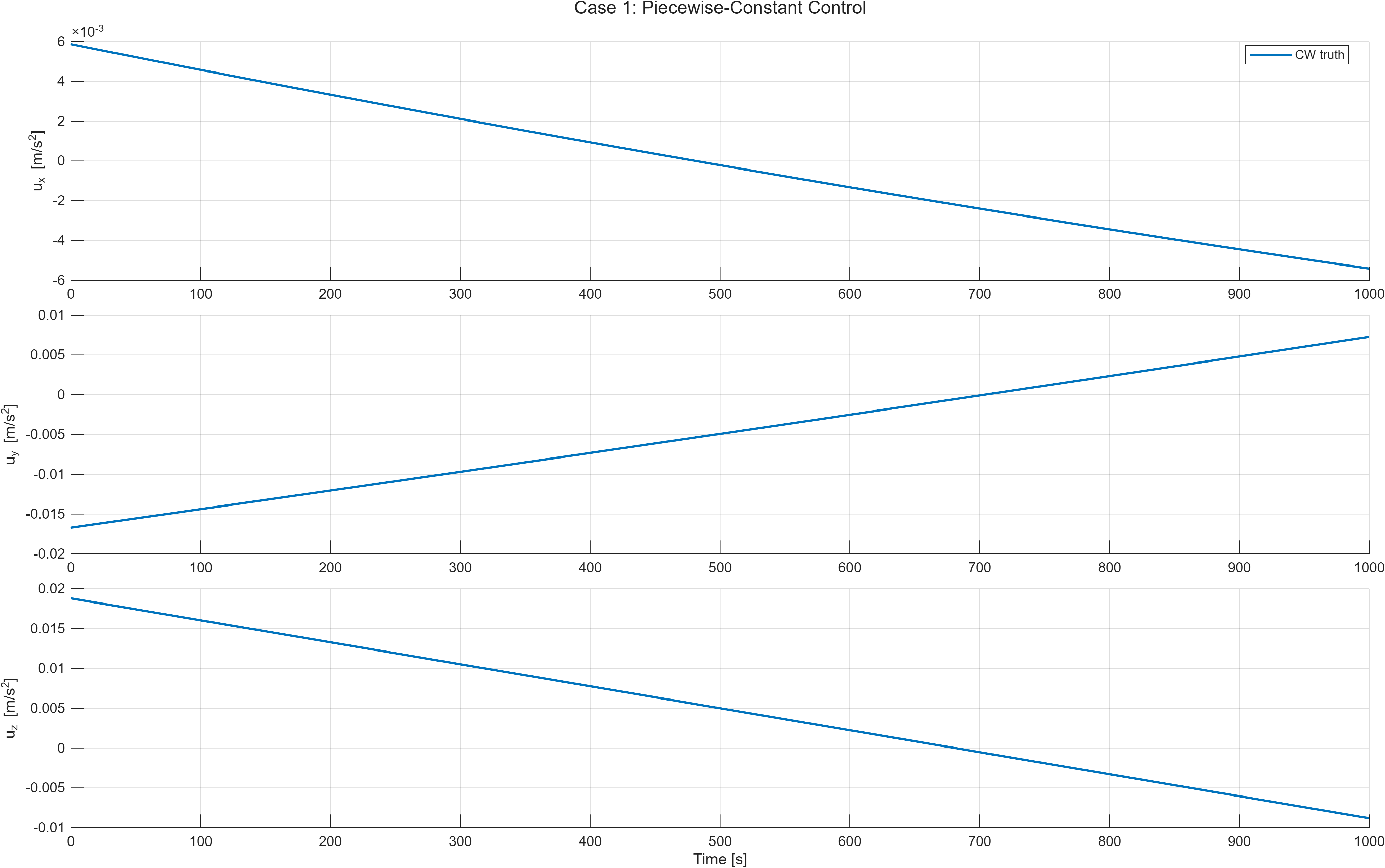
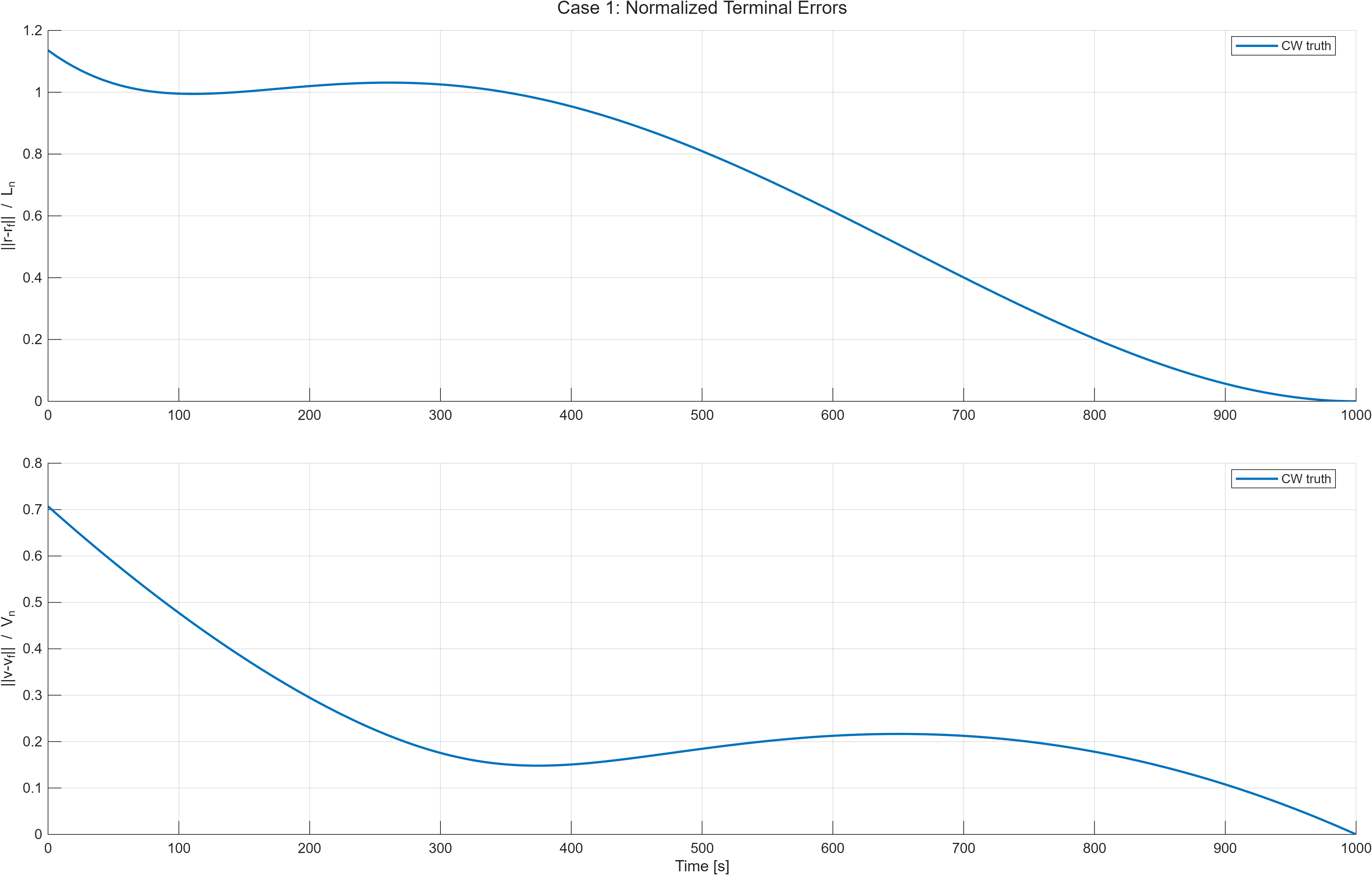
Case 1: Baseline 3D Docking Rendezvous
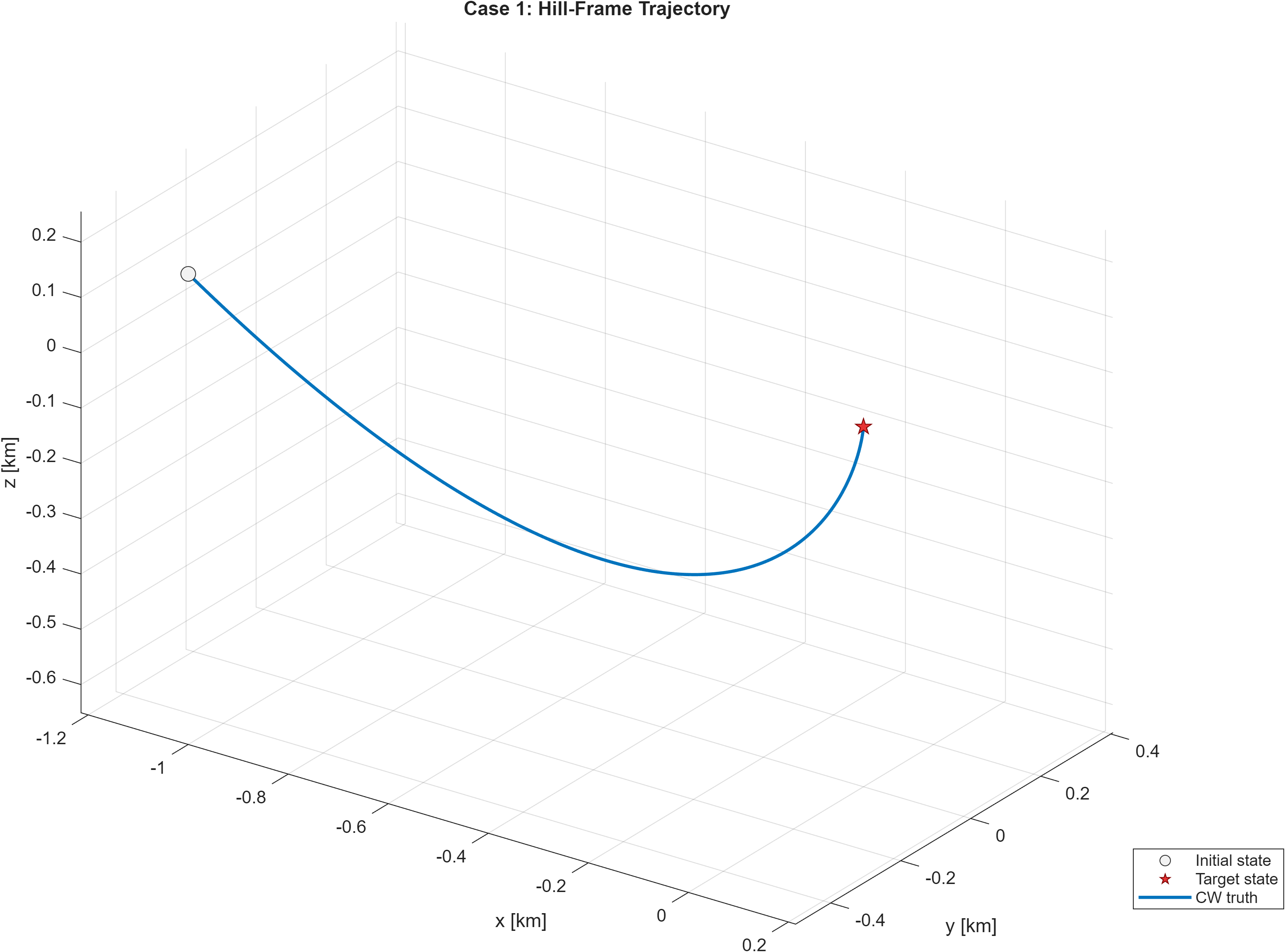
The deputy follows a curved 3D approach from the initial state to the target docking condition.
Animated CW-frame rendezvous visualization.
State, control, and error plots
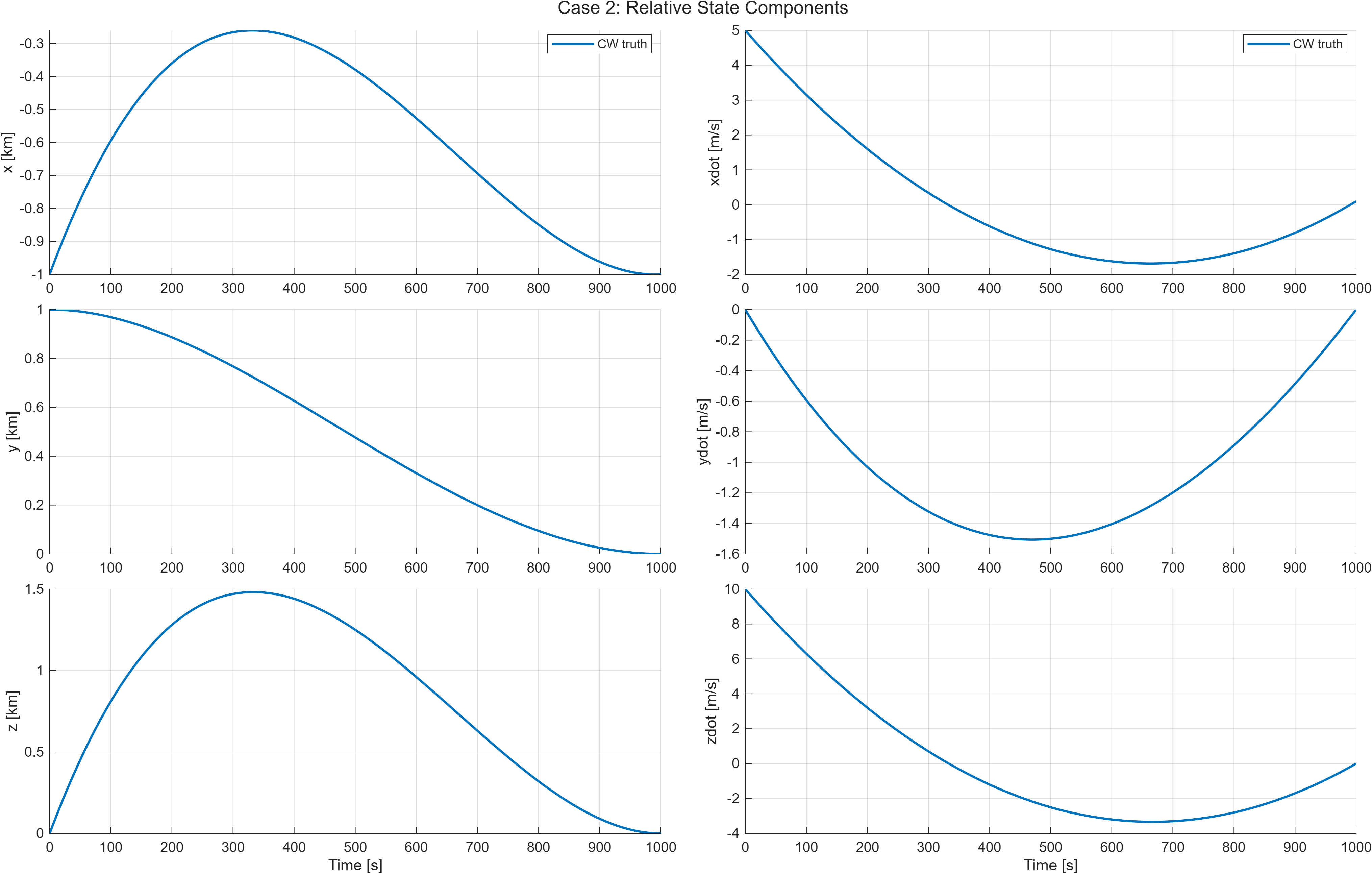
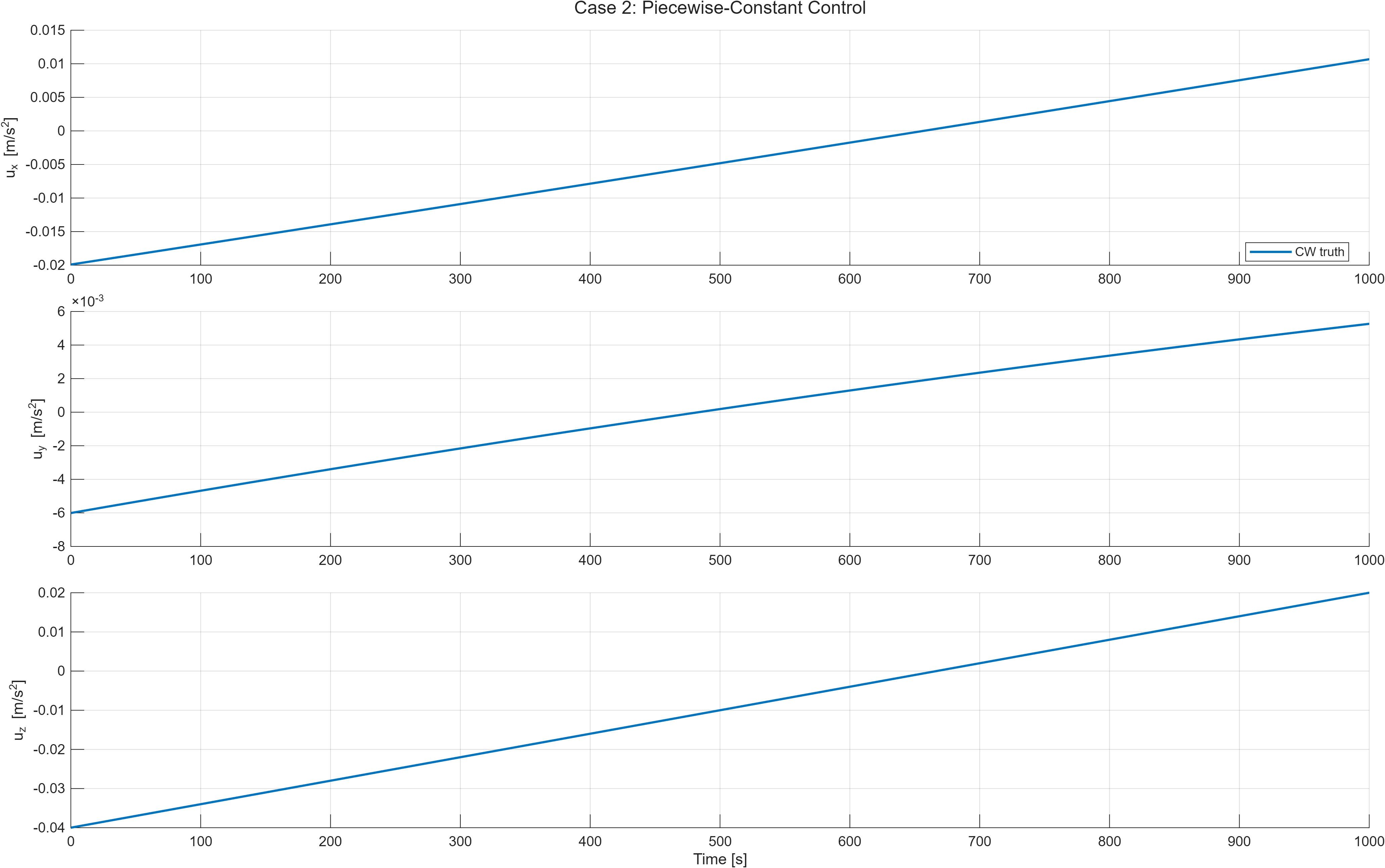
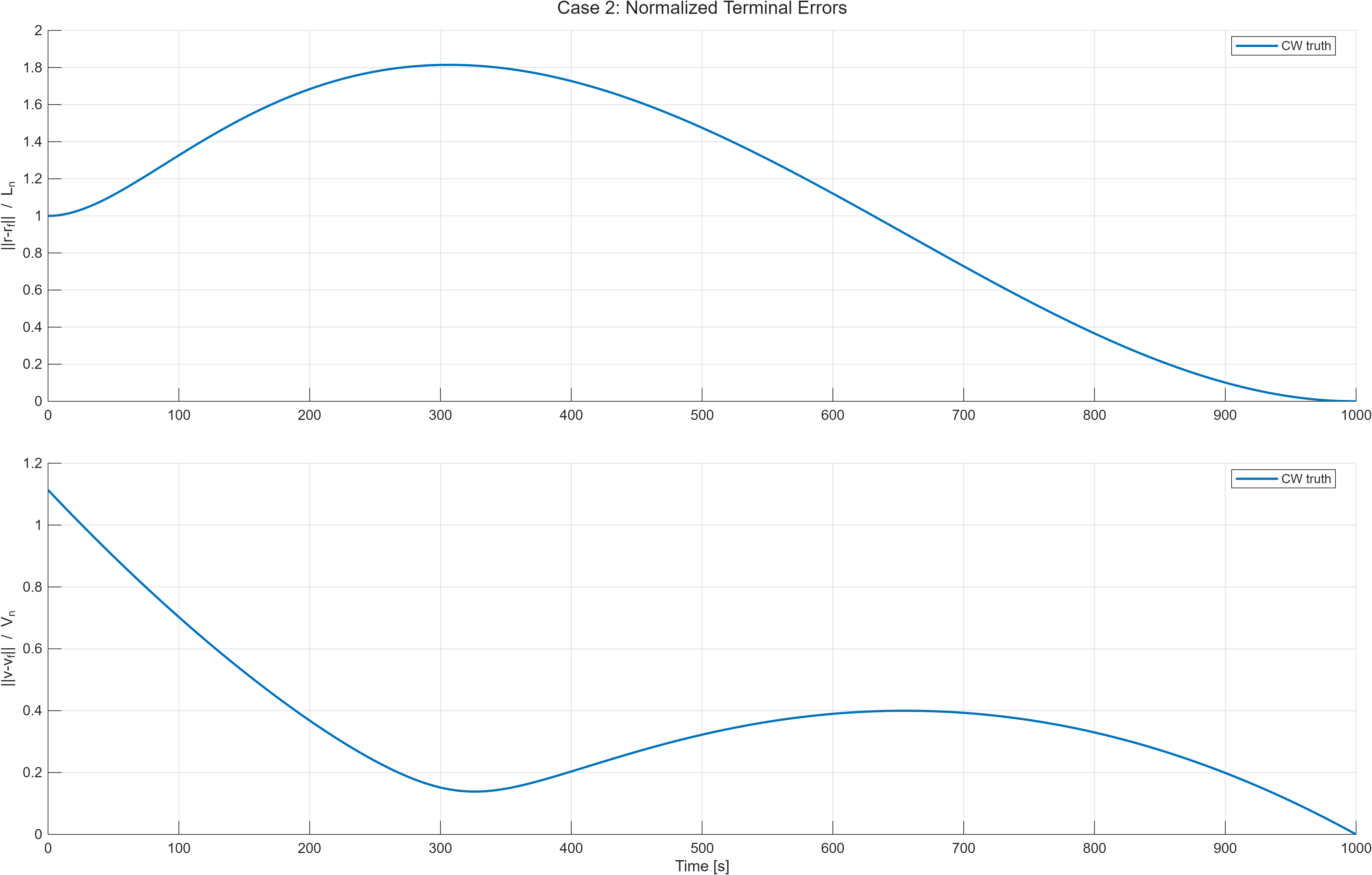
Case 2: Offset Terminal State
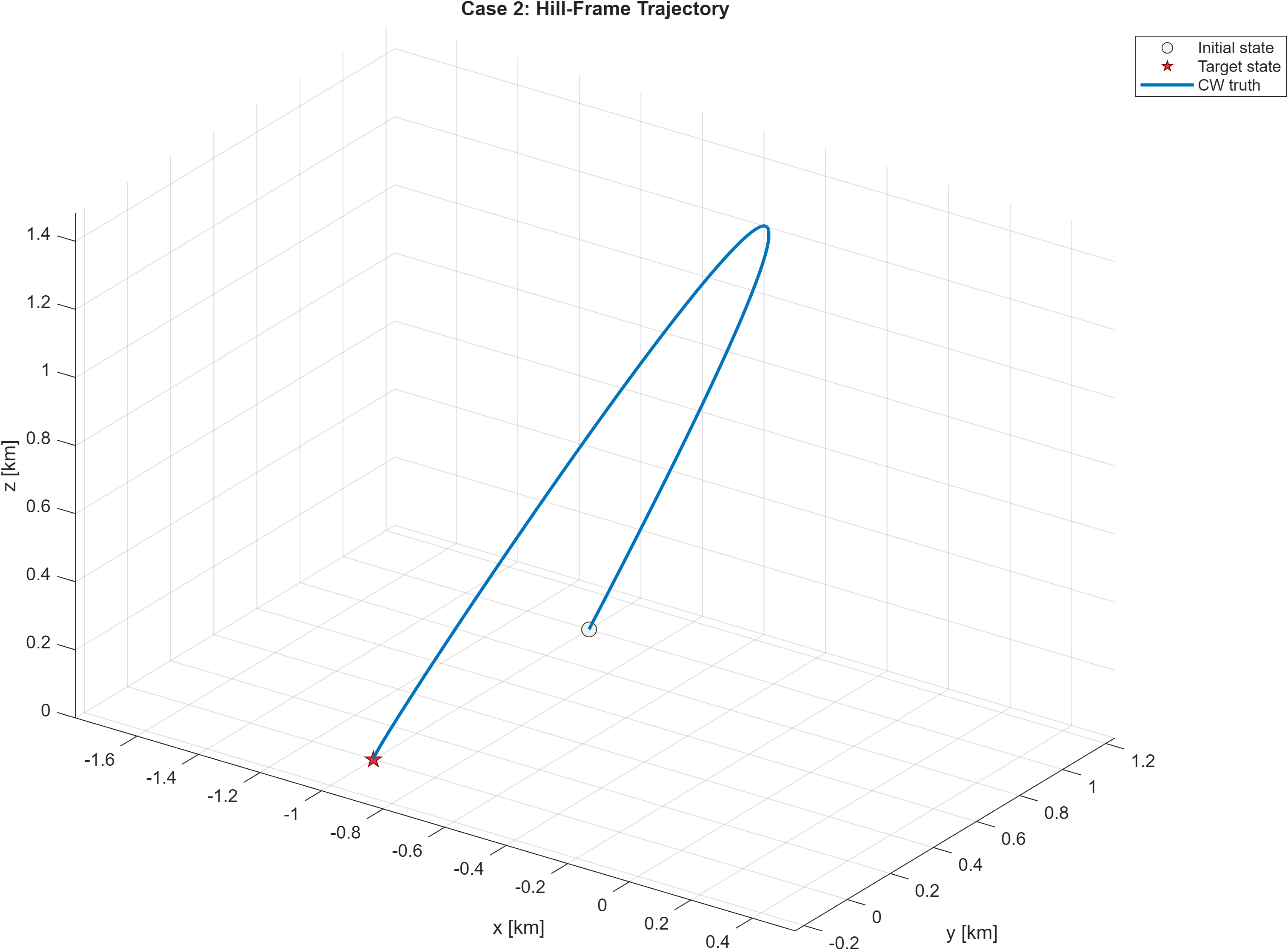
The guidance law targets an offset final state instead of a pure docking point.
Animated offset rendezvous visualization.
State, control, and error plots
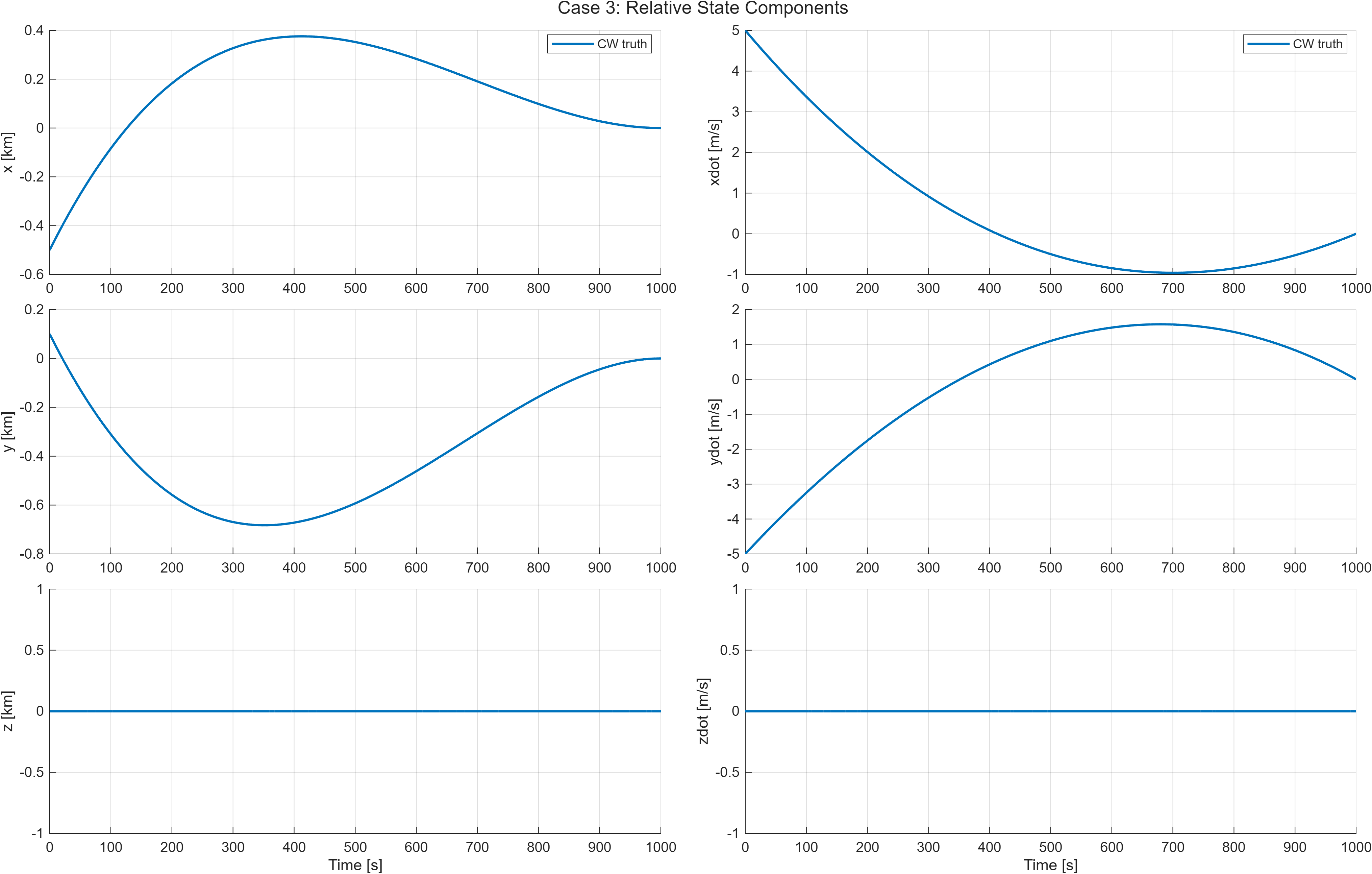
Case 3: Alternate 3D Docking Geometry
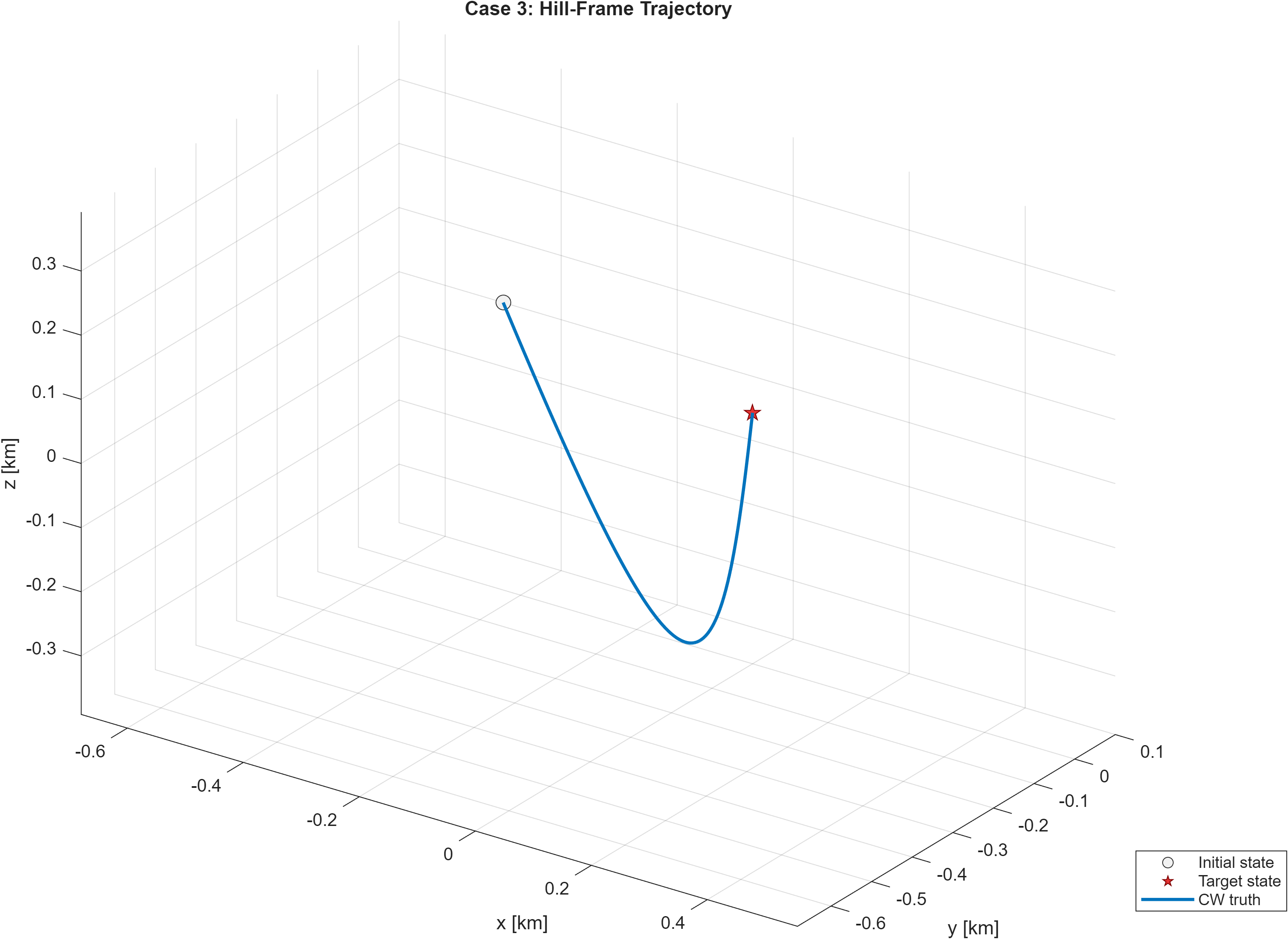
A different approach geometry checks whether the same guidance law remains well behaved.
Animated alternate docking visualization.
State, control, and error plots
Case 4: Long-Horizon Offset Rendezvous
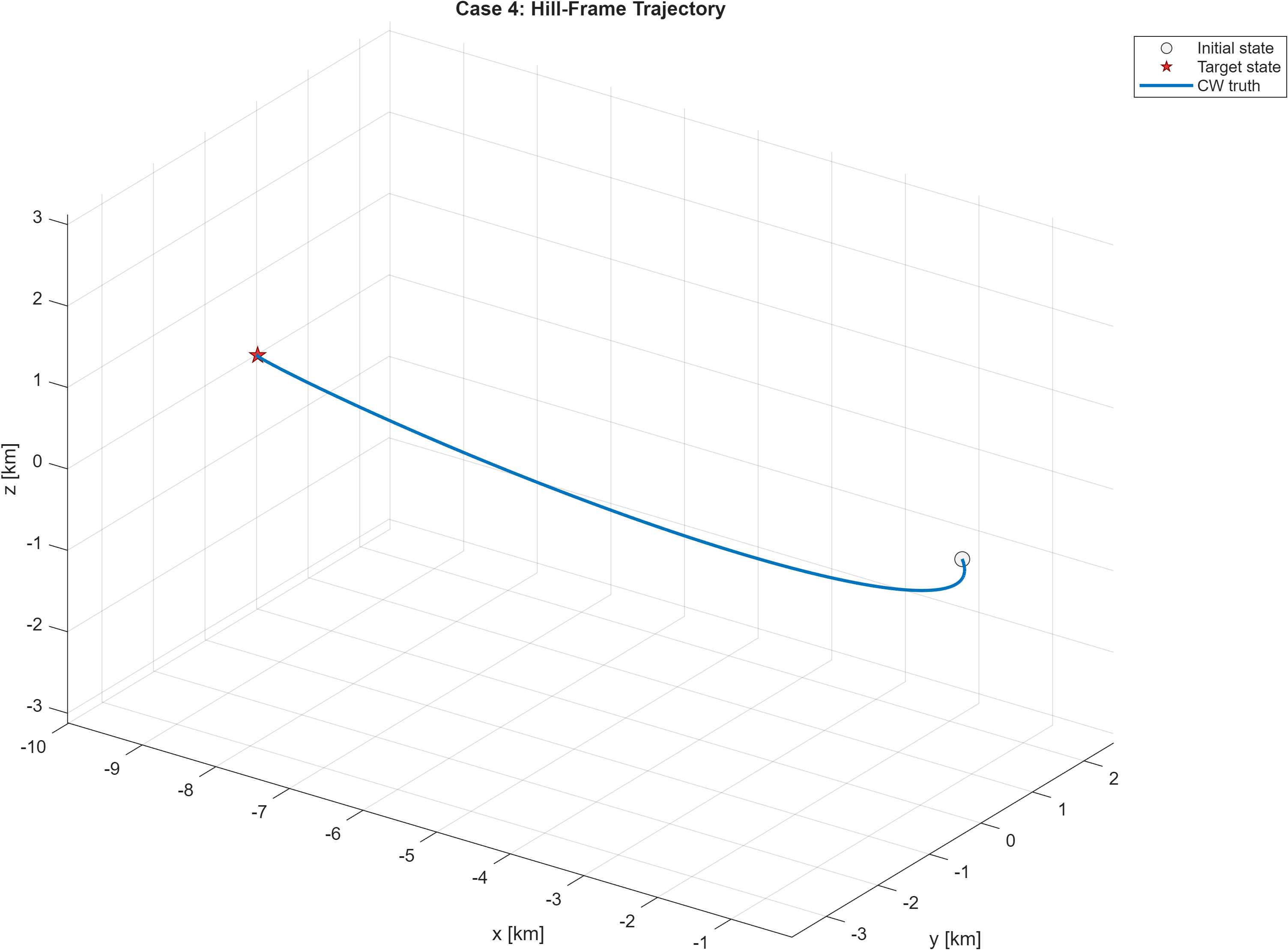
The longer-horizon case uses more time to reach a prescribed offset state.
Animated long-horizon rendezvous visualization.
State, control, and error plots
Nominal Docking Case
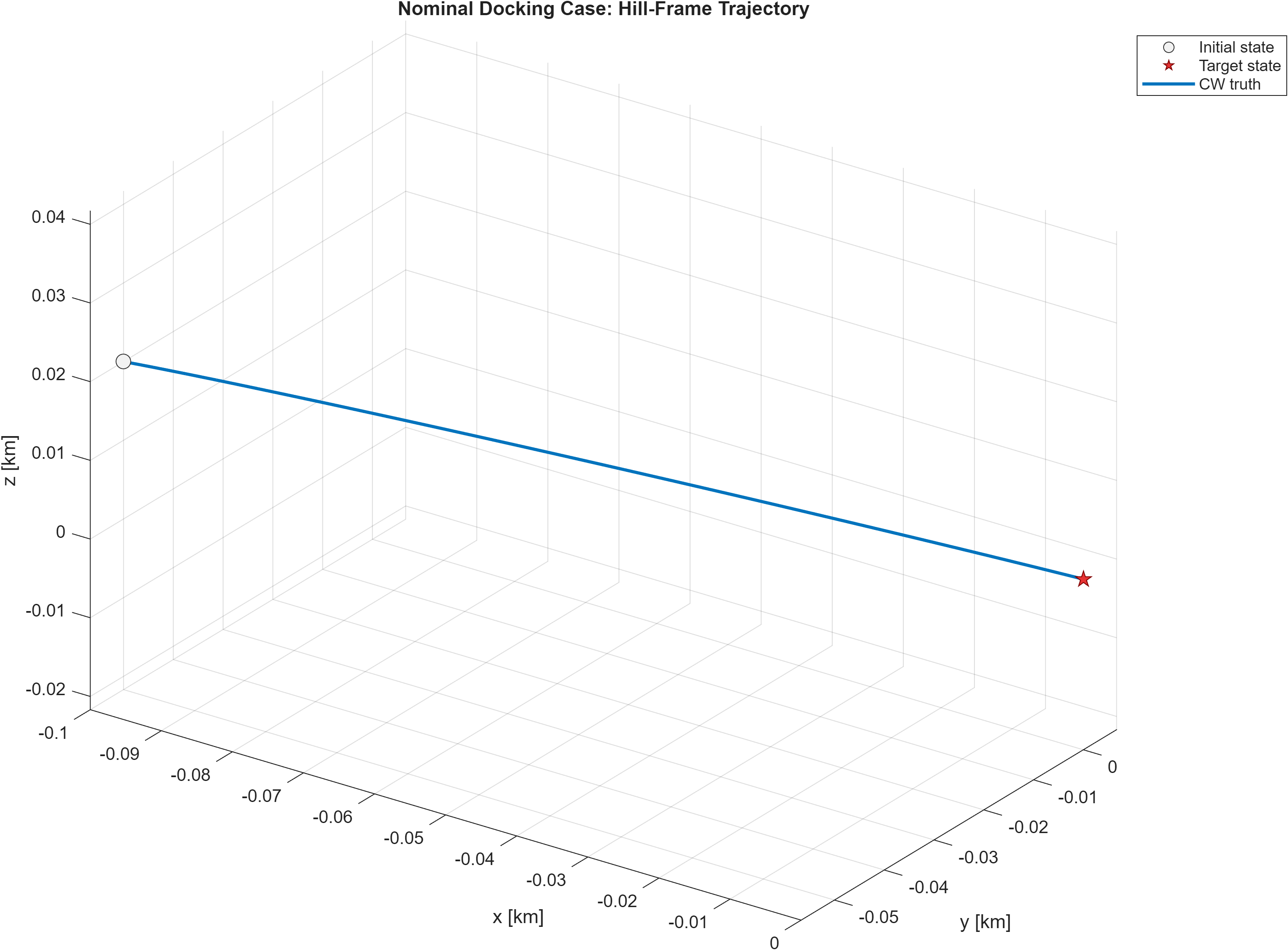
The nominal case starts much closer to the target and requires the smallest control effort.
Animated nominal docking visualization.
State, control, and error plots
Takeaways
The simulations show that the minimum-energy guidance law can hit both docking and offset terminal conditions with extremely small numerical terminal errors. The nominal docking case needs very little acceleration, while the offset cases naturally require larger control effort because the final state is more constrained.
The main lesson is that a compact continuous-time optimal-control derivation can become a practical rendezvous simulation tool: define the target terminal state, select the transfer time, compute the guidance law, and verify the resulting trajectory, controls, and terminal residuals across a family of proximity-operation scenarios.



{kind=link}