

This project presents a complete multi-stage kill chain for search and reacquisition of resident space objects (RSOs), built and presented at the AIAA Region III Student Conference.
The framework combines machine learning, orbit determination, probabilistic propagation, and filtering to reacquire an object on a second pass after initial ground-based sensing.
See the conference presentation here:
Space Domain Awareness Context
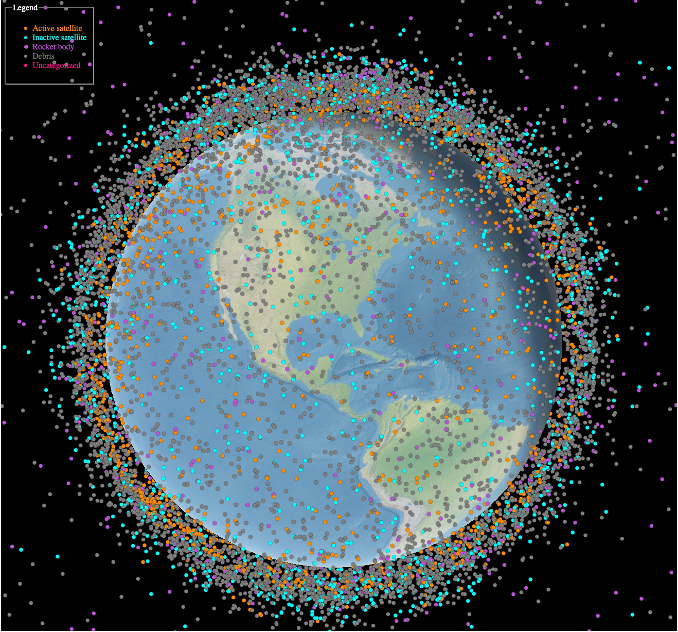
Low Earth Orbit is increasingly congested. The presentation and manuscript frame the problem around custody of active payloads, debris, and other anthropogenic objects under sensor uncertainty, limited coverage, and noisy measurements.
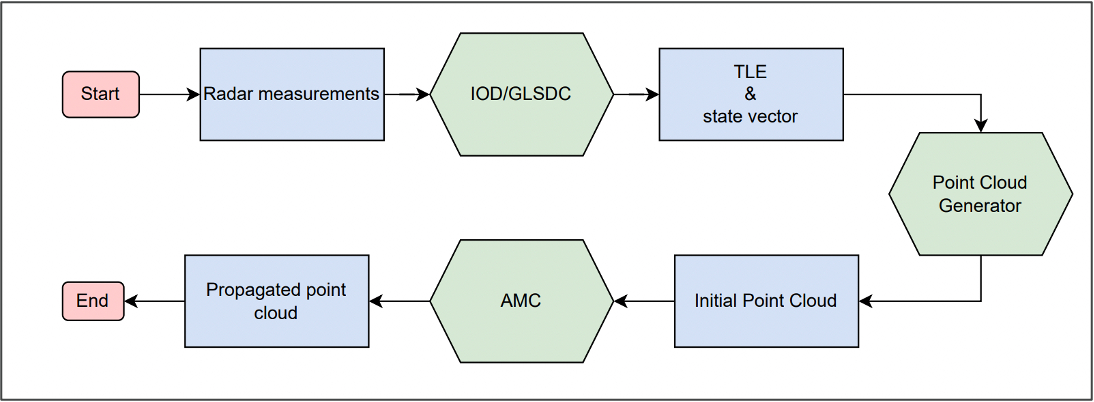
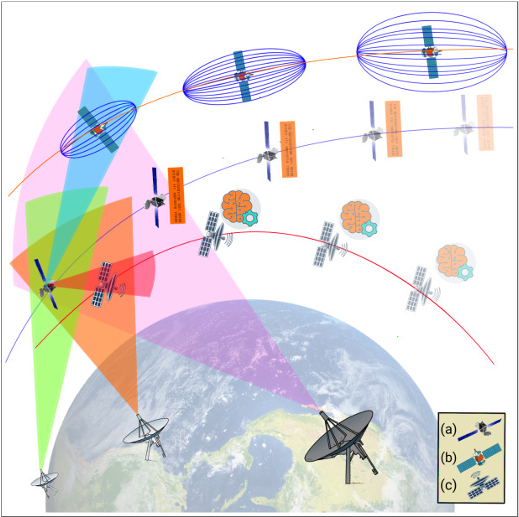
Objective and Kill Chain Layout
Goal: reacquire an initially tracked object on a second pass with high confidence.
Pipeline used (slide-ordered):
- AI launch detection and rocket classification
- Initial Orbit Determination (IOD) from first-pass observations
- Orbit refinement using Gaussian Least Squares Differential Correction (GLSDC)
- Adaptive Monte Carlo (AMC) propagation of uncertainty cloud
- Discrete-time linear Kalman filtering and final orbit comparison

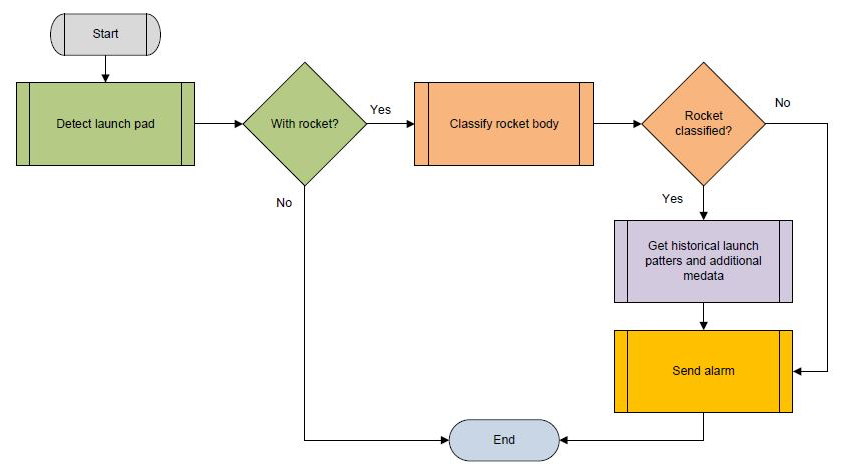
Phase 1 - Launch Detection Using AI
Two CNN-based models were developed:
- Launch pad occupancy detection (rocket present vs empty)
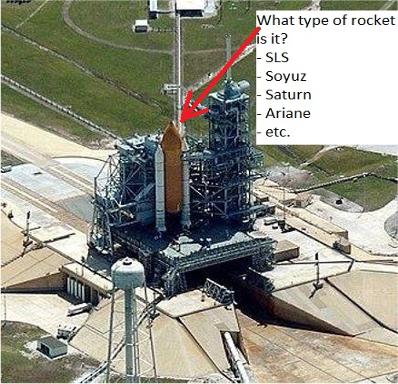
- Rocket type classification
Training/validation split from manuscript:
- 80% training
- 20% validation
Reported model performance:
- Launch pad detection accuracy: 73.33%
- Rocket body classification accuracy: 30.56%

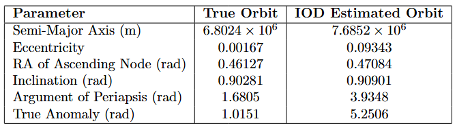
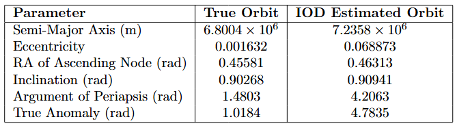
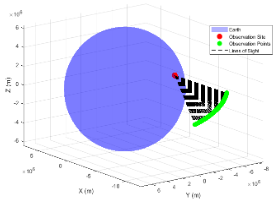
Phase 2 - Initial Orbit Determination (IOD)
IOD uses Gauss angles-only logic from first-pass radar geometry to estimate state and orbital elements.
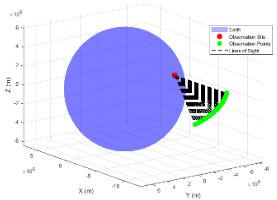
ISS test-case assumptions from manuscript:
- Observation site: AMOS (Maui)
- 100 synthetic observations generated
- Measurement noise injected at approximately +/-5 km range and +/-0.05 deg azimuth/elevation
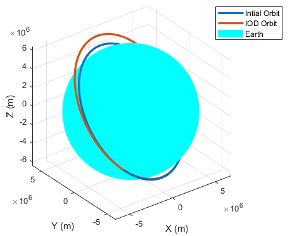
True test-case orbital elements:
- Semi-major axis: 12000 km
- Eccentricity: 0.12
- Inclination: 11 deg
- RAAN: 220 deg
- Argument of periapsis: 42 deg
- True anomaly: 280 deg
Example IOD estimate reported:
- Semi-major axis: 11953 km
- Eccentricity: 0.19334
- Inclination: 14 deg
- RAAN: 257 deg
- Argument of periapsis: 41 deg
- True anomaly: 299 deg
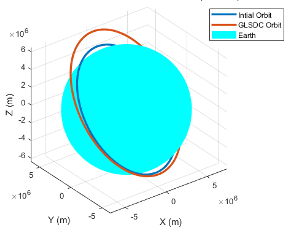
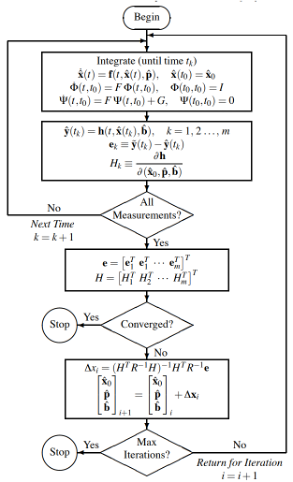
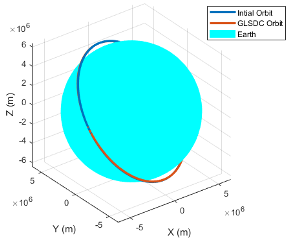
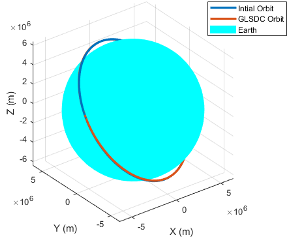
Phase 3 - Orbit Refinement (GLSDC)
GLSDC iteratively refines the initial state by minimizing residual error between predicted and observed measurements using a least-squares correction process and measurement sensitivity (Jacobian) information.
Observed manuscript behavior in this implementation:
- GLSDC ran for 54 iterations
- The run diverged to NaN in the presented test case
- Additional numerical/debug work was identified as future improvement


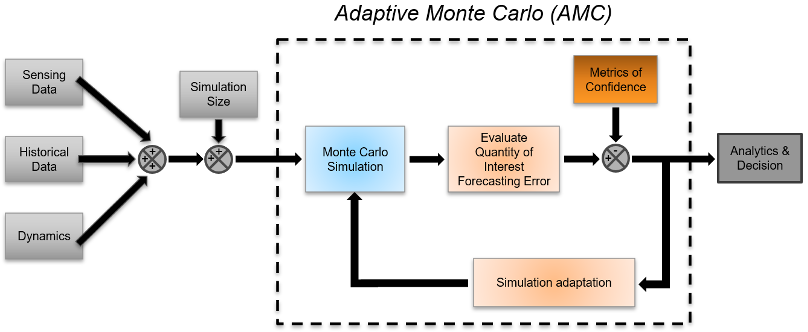
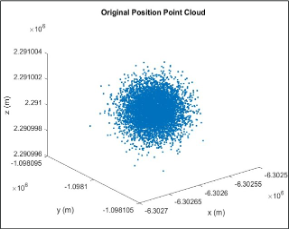
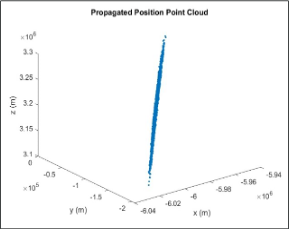
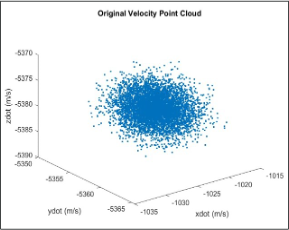
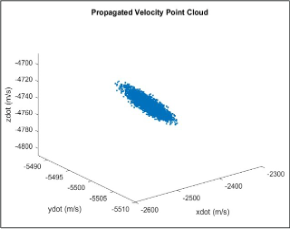
Phase 4 - Adaptive Monte Carlo Propagation (AMC)
AMC propagates a probabilistic cloud of states forward in time under uncertainty. The implementation adaptively adjusts sample count based on variance behavior to balance accuracy and computational cost.
Key manuscript/presentation points:
- Point cloud begins approximately Gaussian
- Cloud shape evolves nonlinearly over time
- Additional particles are generated when uncertainty thresholds are exceeded
- Accuracy improves with larger sample counts
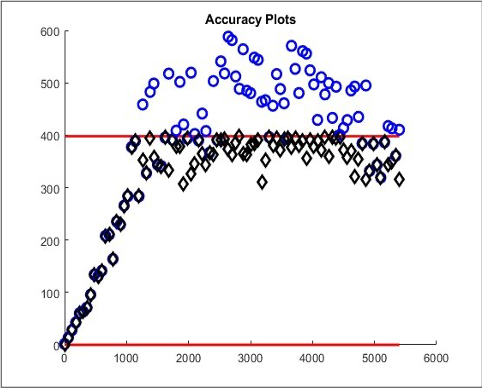
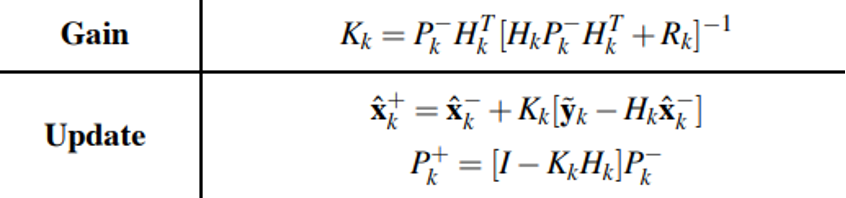
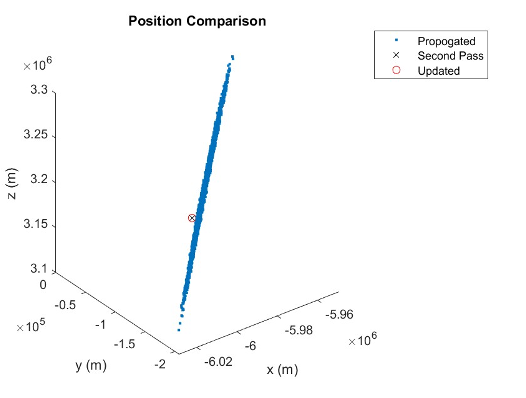
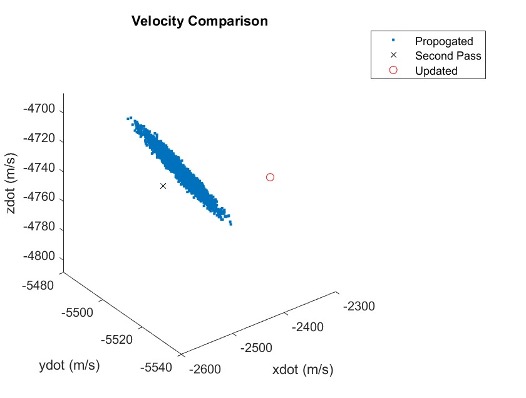
Phase 5 - Kalman Filtering and Reacquisition Test
A discrete-time linear Kalman Filter fuses:
- AMC propagated mean/covariance
- second-pass state estimate
- sensor noise model
Expected output:
- updated state vector
- reduced covariance
- improved confidence for same-object determination
Presentation notes:
- position/orbit agreement looked strong
- velocity showed signs of overcorrection (identified future work)
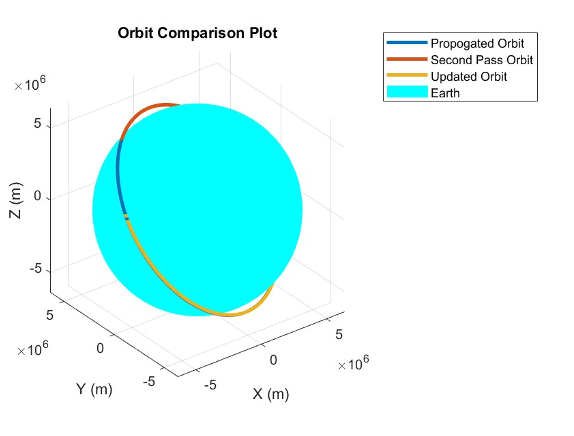
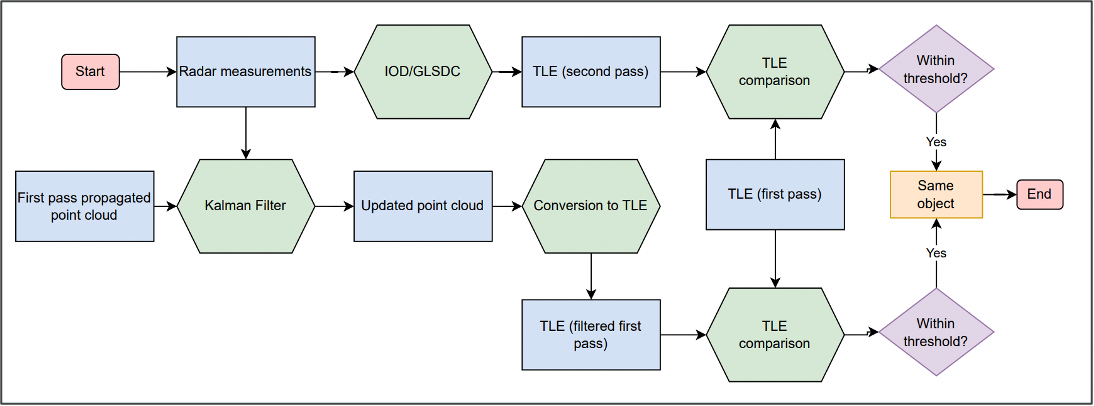
TLE Comparison Criteria and Decision Logic
The manuscript compares first-pass, second-pass, and posterior TLE values using thresholds derived from historical ISS TLE analysis.
Reported matching thresholds:
- Semi-major axis: 0.0 km
- Eccentricity: 0.014
- Inclination: 0.007 deg
- RAAN: 6.283 deg
- Argument of periapsis: 6.291 deg
Using these criteria, the project reports successful same-object classification for the ISS two-pass simulation case.
Final Outcome
The end-to-end framework demonstrated:
- successful object reacquisition in the simulated ISS two-pass case
- operational feasibility of a multi-stage autonomous reacquisition pipeline
- clear next steps for improving robustness with real sensor data and strengthened GLSDC convergence
Future Work
High-priority items from the presentation/manuscript:
- incorporate real sensor feedback and SSN-like observation streams
- improve AI launch and rocket-classification performance
- stabilize and validate GLSDC convergence behavior
- expand to maneuvering or low-thrust targets
- evaluate EKF/UKF and full automated closed-loop kill chain execution
Acknowledgements
This project was supported through Ohio State MAE and collaborators including LADDCS and ARC resources.




{kind=link}